|
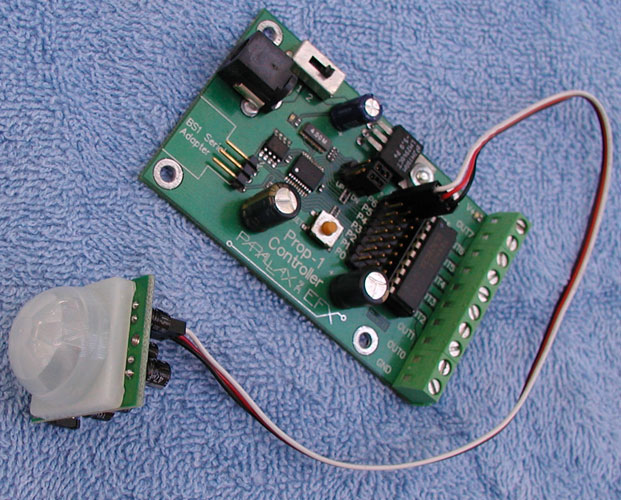
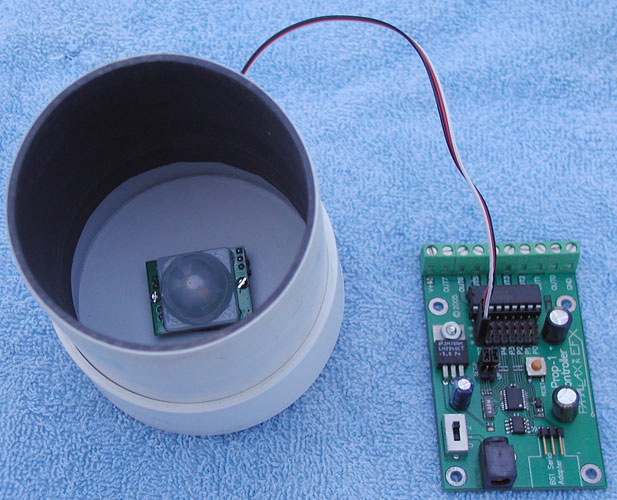
It's intended to
be used with a microcontroller but it can be used independently (see below).
Here it's shown with a EFX-TEK Prop-1 controller.
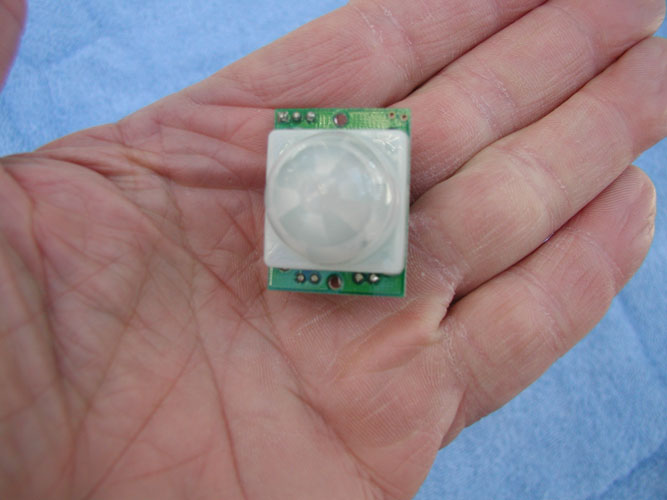
I found the sensitivity
of the unit to be very good, responding immediately to any but the slightest
body movements while standing about 10 feet in front of it. My unscientific
testing found the useful angle to be about 45 degrees either side of center
for a total of 90 degrees.
In the Parallax documentation,
they talk about a calibration period of from 10-60 seconds after power
is first applied. I found this to be the case, as in the first seconds
of operation, the output is continuously turning on and off. I found it
best to turn it on and leave the room for about a minute. When writing
a program for this sensor, you probably want to take this into consideration
so your prop is not cycling during this time.
The unit output is
high whenever there is motion detected. If the motion is continuous, the
output remains high. After motion stops, the output remains high for from
2-4 seconds.
|